Khojdys
-
Postów
207 -
Dołączył
-
Ostatnia wizyta
Typ zawartości
Forum
Wydarzenia
Blogi
Artykuły
Treść opublikowana przez Khojdys
-
Peha Peha, Nie pomyślałem otym, sorki 50 MJ, dodać butelki PET i śmiga do 100MJ. Popiołu nie ma.Hihihi. Da się? Pozdrawiam Krzysztof
-
Jackw64, Jeżeli ilość popiołu cię martwi to kup ekogroszek kolumbijski ma 1-3% popiół - mniej niż pelet. Testy są na kanale "Kamil Miernik" na YT. Pozdrawiam Krzysztof
-
Jackw64 Odnośnie twojej sugestii że pelet jest super to powiem dwie rzeczy: 1. Jak tak jest to czemu na forum o peletowcach, jest tyle niezadowolonych użytkowników? 2. Pelet ma wartość opalowa 15 MJ (w porywach), najpodlejszy ekogroszek brunatny czeski 18-19,a śmieci z kamiennego 21-22, ja palę JARET PLUS 25 MJ po 760-800, a pelet podłej jakości 800. (nie palę ale czytam forum o peletowcach). To moje przemyślenia, ale oczywiście "wszędzie dobrze gdzie nas nie ma", masz swoją opinię - tak trzymaj. Pozdrawiam Krzysztof
-
Witam, darko240973 ja pisałem o swoich doświadczeniach z kotem KLIMOSZ oryginalnie miał sterownik RECALLART, potem wymieniłem sterownik na BRULI, (BTW mogę odsprzedać jak ktoś chce). Na SEKO nie palilem innym paliwem oprócz JARET PLUS. Chcę sprawdzić jak on sobie poradzi bo mam koło 500 groszku 29 MJ. We wtorek test. Pozdrawiam Krzysztof
-
Witam, palę w kotłach na ekogroszek z podajnikiem 20 lat. 19lat używałem KLIMOSZA z retorta pierwszej generacji i po próbach z ekogroszkiem 28-30 MJ odpuściłem sobie. To była fabryka koksu. Od 15 lat używam ekogroszku 25 MJ (ja akurat JARET PLUS) bo mam blisko zaufanego dostawcę no i TAURON ewentualnie ale koszty dostawy chore maja. Tylko, że KLIMOSZ to przerobiony kocioł zasypowy. Palił mi 25-30 kg na dobę niezależnie od węgla. Teraz palę 18-20 kg, to wynika że sprawności kotła. Mam ochotę na test z węglem wysokoenergetycznym, ale potrzebuję mrozu i weekendu. Pozdrawiam Krzysztof
-
Witaj Piotr16, to co piszesz to 100% racji. W algorytmie PID są trzy parametry: 1. P - proporcjonalny do błędu - różnica zadanej razy coś daje sygnał do reakcji, działa to słabo. 2. I- całka - układ co jakiś czas "mnozy błąd" - tzn. np. Błąd =1 stopień, po minucie system uznaje, że powinien reagować jak na 2 stopnie, po kolejnej jak na 3, itd. 3. D-rozniczka, chyba jej nie ma w PLUM bo jest "niestabilna", ale system sprawdza szybkość zmiany parametru - daje to kopa na starcie. Jako automatyk powiem po raz kolejny - szacun dla programistów PLUM. To tak jakby ktoś robił układ napędowy pojazdu, nie wiedząc czy użytkownik napędzi rower czy czołg. Trudne? Pozdrawiam Krzysztof
-
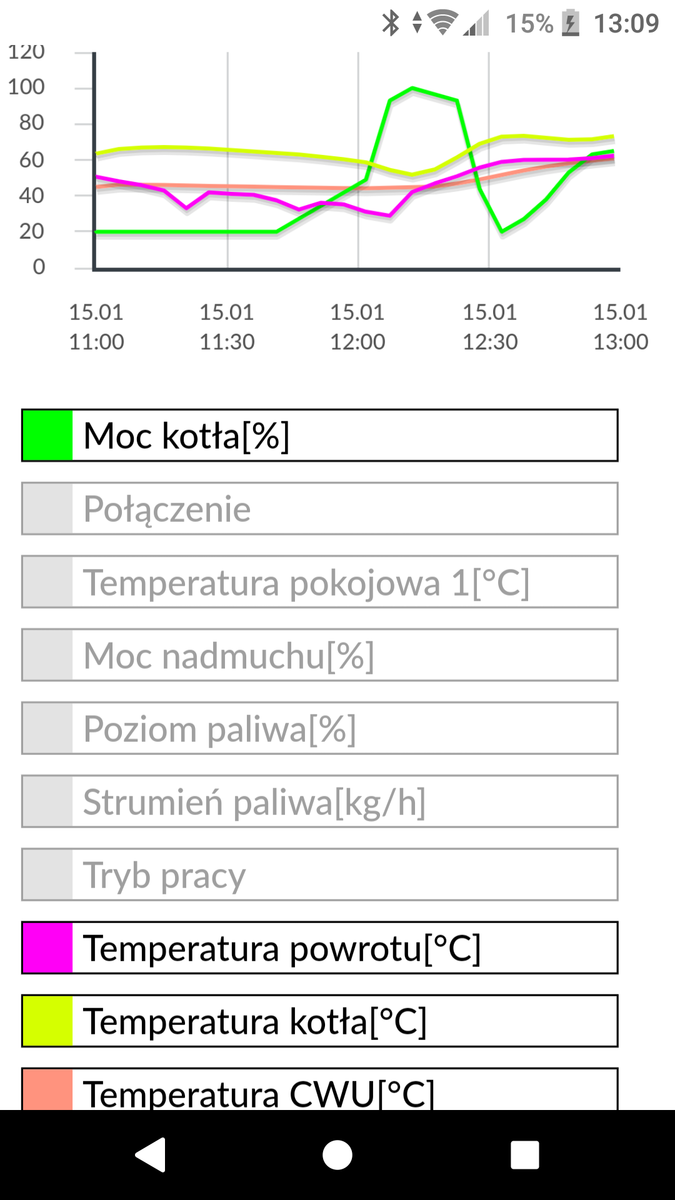
Witam, Odpowiadając na twoje pytanie Peha to jako inżynier automatyka powiem - Nie, powinno być dużo gorzej. Dlaczego? Ponieważ koledzy z PLUM nie znają obiektu, czyli konkretnej instalacji. Szacunek, że PID tak działa. Ja osobiście podniósł bym I-calke bo regulator boi się "przywalic mocą" na początku. Zrobiłem test: kazałem nagrzac CWU do 70 stopni. Wykres masz poniżej. Dla wyjaśnienia czujnik w zbiorniku jest około 15 cm poniżej wezownicy CO. Co PLUM wg. Ciebie zrobił nie tak. Poprzednio miałem Reallart oraz Bruli na Klimoszu żeliwny z podajnikiem - spalanie 25-30 na dobę. Teraz 18-20. To nie ster a kocioł zmienił bo inna sprawność. Pozdrawiam Krzysztof

-
Peha, Dzięki za info. Pozdrawiam Krzysiek
-
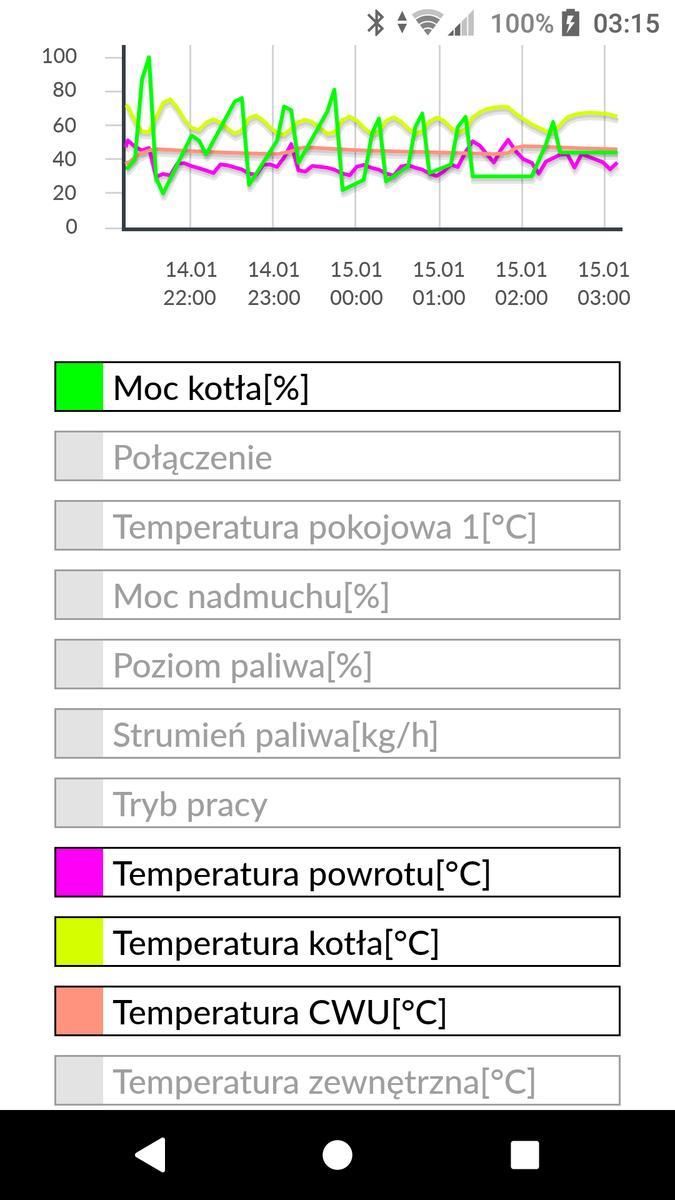
Witam serdecznie wszystkich, po zainstalowaniu Econeta zacząłem bawić się ustawieniami. Dzięki wielkie wszystkim piszący na tym forum. Informacje ze PLUM nie moduluje mocy są nieprawdziwe! Pozdrawiam Krzysztof
-
Witam, a skąd brałeś powietrze? Wierciles w wentylatorze? Pozdrawiam Krzysztof
-
Witam serdecznie wszystkich, od kwietnia 2018 używam kociołka SEKO MAXX LE 25 kW. Dla mnie super. Mam pytanie czy ktoś zrobił może osuszanie zasobnika w tych kotłach? Pozdrawiam serdecznie Krzysztof